

Implementing Reinforcement Learning Maze Based on openYuanrong#
Reinforcement learning is a branch of machine learning where machines interact with the environment by observing it and taking actions to maximize expected rewards. In short, it’s about teaching machines how to learn and accumulate experience through continuous trial and error to achieve high rewards.
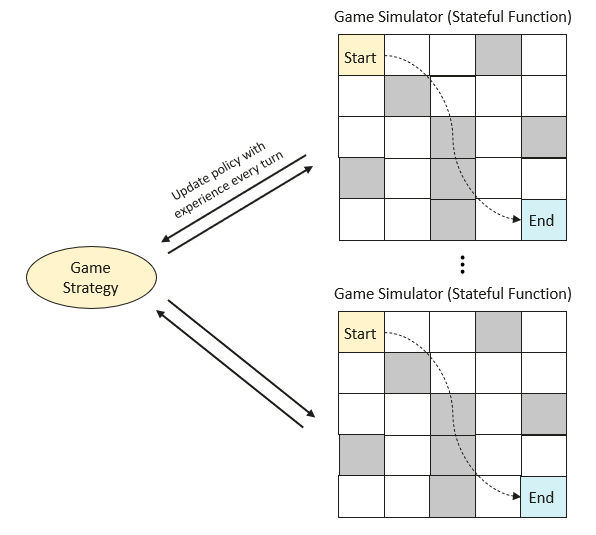
This example demonstrates how to use openYuanrong to train a simple policy to play a maze game, including:
How to simulate a maze game using stateful functions.
How to share game policies between multiple stateful function instances through data objects.
Solution Overview#
We use multiple openYuanrong stateful function instances to simulate the maze game and record game experiences. These experience values are used to update the game policy. The updated policy continues to be used in the next round of simulated games, continuously iterating and optimizing.
Prerequisites#
Refer to Deploy on Hosts to complete openYuanrong deployment.
Implementation Process#
Set Up Maze Environment#
We use the class Environment to create a 5x5 grid maze environment, with the starting point at (0,0) and the endpoint at (4,4). The variable action_space defines the number of actions that can be executed in the grid, i.e., four movement directions: up, down, left, and right. In the grid, we set a reward of 10 points for reaching the endpoint, and also set some traps to slightly increase the game difficulty. If the player moves to a trap position, they will be penalized by deducting 10 points. The step method defines how to move in the grid. If the movement would go out of bounds, the position remains unchanged.
class Environment:
def __init__(self):
self.state, self.goal = (0, 0), (4, 4)
self.action_space = 4 # Down (0), Left (1), Up (2), Right (3)
self.maze_space = (5, 5)
self.maze = np.zeros((self.maze_space[0], self.maze_space[1]))
# Reward 10 points for escaping the maze
self.maze[self.goal] = 10
# Penalty 5 points for falling into a trap
self.maze[(0, 3)] = -10
self.maze[(1, 1)] = -10
self.maze[(2, 2)] = -10
self.maze[(2, 4)] = -10
self.maze[(3, 0)] = -10
self.maze[(3, 2)] = -10
self.maze[(4, 2)] = -10
def reset(self):
self.state = (0, 0)
return self.get_state()
def get_state(self):
return (self.state[0], self.state[1])
def get_reward(self):
return self.maze[(self.state[0], self.state[1])]
def is_done(self):
return self.state == self.goal
def step(self, action):
if action == 0: # Down
self.state = (min(self.state[0] + 1, self.maze_space[0] - 1), self.state[1])
elif action == 1: # Left
self.state = (self.state[0], max(self.state[1] - 1, 0))
elif action == 2: # Up
self.state = (max(self.state[0] - 1, 0), self.state[1])
elif action == 3: # Right
self.state = (self.state[0], min(self.state[1] + 1, self.maze_space[1] - 1))
else:
raise ValueError("Invalid action")
return self.get_state(), self.get_reward(), self.is_done()
Define Game Policy#
Any reinforcement learning algorithm requires a method to repeatedly simulate to collect experience data. Here, we create a Policy class to decide how to navigate the maze. Its get_action method accepts the current player’s state and returns the next action. The policy selects the highest value action by creating a “state-action-value” table, while also using random actions to explore other possibilities. Each game round, because different actions bring different rewards, by recording this data, the update method continuously updates our policy table, approaching the optimal values that different actions can bring, finding the optimal path.
class Policy:
def __init__(self, env):
self.actions = np.arange(0, env.action_space)
self.action_table = np.zeros((env.maze_space[0], env.maze_space[1], env.action_space))
def get_action(self, state, epsilon=0.8):
if random.uniform(0, 1) < epsilon:
return np.random.choice(self.actions) # Choose action randomly with certain probability
return np.argmax(self.action_table[state[0], state[1], self.actions])
def update(self, experiences, weight=0.1, discount_factor=0.9):
# Update policy using round experience and return the path taken for display
route = []
for state, action, reward, next_state in experiences:
route.append(next_state)
next_max = np.max(self.action_table[next_state])
value = self.action_table[state][action]
new_value = (1 - weight) * value + weight * (reward + discount_factor * next_max)
self.action_table[state][action] = new_value
return route
Simulate Game Rounds#
We create a Simulator class to simulate playing the maze game. The rollout method returns the experience accumulated in each round. The class uses the @yr.instance annotation to enable instances of this class to run distributed on nodes in the openYuanrong cluster.
@yr.instance
class Simulator(object):
def __init__(self, env):
self.env = env
def rollout(self, policy, epsilon=0.8):
# Play one round of game, accumulate experience
experiences = []
state = self.env.reset()
done = False
while not done:
action = policy.get_action(state, epsilon)
next_state, reward, done = self.env.step(action)
# If state doesn't change after action, retry
if next_state == state:
continue
experiences.append([state, action, reward, next_state])
state = next_state
return experiences
Main Flow#
We initialize the openYuanrong environment through yr.init() and create two simulator instances simulators to run distributed in parallel, updating the policy each round and rapidly iterating to acquire experience. You can easily scale to larger clusters by modifying the simulators_num and episodes_num parameters.
Tip
We specified the CPU and memory resources required for the Simulator class instances. In scenarios requiring heterogeneous resources, you can add --npu_collection_mode and --gpu_collection_enable parameters to the master and worker node deployment commands, and openYuanrong will automatically collect heterogeneous resource information from nodes. In actual use, specify corresponding resources through the custom_resources parameter.
# Specify one 3090 model GPU card
opt.custom_resources = {"GPU/NVIDIA GeForce RTX 3090/count": 1}
# Specify one NPU card of any model
opt.custom_resources = {"NPU/.+/count": 1}
if __name__== "__main__" :
# Initialize openYuanrong environment
yr.init()
# Create two simulators, adjust according to openYuanrong cluster size
simulators_num = 2
# Each simulator plays 500 rounds
episodes_num = 500
env = Environment()
policy = Policy(env)
# Create stateful function Simulator class instances and set required resources (1 CPU core, 1G memory)
opt = yr.InvokeOptions(cpu=1000, memory=1024)
simulators = [Simulator.options(opt).invoke(Environment()) for _ in range(simulators_num)]
max_reward_route = float("-inf")
for episode in range(episodes_num):
policy_ref = yr.put(policy)
experiences = [s.rollout.invoke(policy_ref) for s in simulators]
# Wait for all results to return
while len(experiences) > 0:
result = yr.wait(experiences)
for xp in yr.get(result[0]):
# Update game policy, use new policy in next round
route = policy.update(xp)
# Calculate current round reward, print action path of highest reward round for observing algorithm convergence speed
route_reward = sum(env.maze[state] for state in route)
if max_reward_route < route_reward:
max_reward_route = route_reward
print(f"Episode {episode}, the optimal route is {route}, total reward {max_reward_route}")
# Objects not yet returned continue waiting
experiences = result[1]
# Destroy instances, release resources
for s in simulators:
s.terminate()
yr.finalize()
Run Program#
Complete Code
import numpy as np
import random
import yr
class Environment:
def __init__(self):
self.state, self.goal = (0, 0), (4, 4)
self.action_space = 4 # Down (0), Left (1), Up (2), Right (3)
self.maze_space = (5, 5)
self.maze = np.zeros((self.maze_space[0], self.maze_space[1]))
# Reward 10 points for escaping the maze
self.maze[self.goal] = 10
# Penalty 5 points for falling into a trap
self.maze[(0, 3)] = -10
self.maze[(1, 1)] = -10
self.maze[(2, 2)] = -10
self.maze[(2, 4)] = -10
self.maze[(3, 0)] = -10
self.maze[(3, 2)] = -10
self.maze[(4, 2)] = -10
def reset(self):
self.state = (0, 0)
return self.get_state()
def get_state(self):
return (self.state[0], self.state[1])
def get_reward(self):
return self.maze[(self.state[0], self.state[1])]
def is_done(self):
return self.state == self.goal
def step(self, action):
if action == 0: # Down
self.state = (min(self.state[0] + 1, self.maze_space[0] - 1), self.state[1])
elif action == 1: # Left
self.state = (self.state[0], max(self.state[1] - 1, 0))
elif action == 2: # Up
self.state = (max(self.state[0] - 1, 0), self.state[1])
elif action == 3: # Right
self.state = (self.state[0], min(self.state[1] + 1, self.maze_space[1] - 1))
else:
raise ValueError("Invalid action")
return self.get_state(), self.get_reward(), self.is_done()
class Policy:
def __init__(self, env):
self.actions = np.arange(0, env.action_space)
self.action_table = np.zeros((env.maze_space[0], env.maze_space[1], env.action_space))
def get_action(self, state, epsilon=0.8):
if random.uniform(0, 1) < epsilon:
return np.random.choice(self.actions) # Choose action randomly with certain probability
return np.argmax(self.action_table[state[0], state[1], self.actions])
def update(self, experiences, weight=0.1, discount_factor=0.9):
# Update policy using round experience and return the path taken for display
route = []
for state, action, reward, next_state in experiences:
route.append(next_state)
next_max = np.max(self.action_table[next_state])
value = self.action_table[state][action]
new_value = (1 - weight) * value + weight * (reward + discount_factor * next_max)
self.action_table[state][action] = new_value
return route
@yr.instance
class Simulator(object):
def __init__(self, env):
self.env = env
def rollout(self, policy, epsilon=0.8):
# Play one round of game, accumulate experience
experiences = []
state = self.env.reset()
done = False
while not done:
action = policy.get_action(state, epsilon)
next_state, reward, done = self.env.step(action)
# If state doesn't change after action, retry
if next_state == state:
continue
experiences.append([state, action, reward, next_state])
state = next_state
return experiences
if __name__== "__main__" :
# Initialize openYuanrong environment
yr.init()
# Create two simulators, adjust according to openYuanrong cluster size
simulators_num = 2
# Each simulator plays 500 rounds
episodes_num = 500
env = Environment()
policy = Policy(env)
# Create stateful function Simulator class instances and set required resources (1 CPU core, 1G memory)
opt = yr.InvokeOptions(cpu=1000, memory=1024)
simulators = [Simulator.options(opt).invoke(Environment()) for _ in range(simulators_num)]
max_reward_route = float("-inf")
for episode in range(episodes_num):
policy_ref = yr.put(policy)
experiences = [s.rollout.invoke(policy_ref) for s in simulators]
# Wait for all results to return
while len(experiences) > 0:
result = yr.wait(experiences)
for xp in yr.get(result[0]):
# Update game policy, use new policy in next round
route = policy.update(xp)
# Calculate current round reward, print action path of highest reward round for observing algorithm convergence speed
route_reward = sum(env.maze[state] for state in route)
if max_reward_route < route_reward:
max_reward_route = route_reward
print(f"Episode {episode}, the optimal route is {route}, total reward {max_reward_route}")
# Objects not yet returned continue waiting
experiences = result[1]
# Destroy instances, release resources
for s in simulators:
s.terminate()
yr.finalize()
Reference output is as follows. The path may contain repeated positions. You can further optimize the algorithm, for example, by setting the default reward for all positions in the environment to -1.
Episode 0, the optimal route is [(1, 0), (0, 0), (1, 0), (1, 1), (1, 2), (2, 2), (2, 3), (2, 2), (3, 2), (3, 1), (3, 2), (4, 2), (3, 2), (4, 2), (4, 1), (4, 0), (4, 1), (3, 1), (4, 1), (3, 1), (2, 1), (3, 1), (3, 0), (4, 0), (3, 0), (4, 0), (4, 1), (4, 0), (4, 1), (3, 1), (3, 2), (3, 3), (2, 3), (3, 3), (4, 3), (4, 4)], total reward -100.0
Episode 1, the optimal route is [(1, 0), (0, 0), (1, 0), (0, 0), (0, 1), (1, 1), (1, 0), (1, 1), (1, 2), (0, 2), (1, 2), (1, 1), (1, 2), (1, 1), (2, 1), (3, 1), (4, 1), (4, 0), (4, 1), (4, 2), (4, 1), (4, 0), (4, 1), (3, 1), (4, 1), (4, 0), (4, 1), (4, 0), (4, 1), (4, 0), (4, 1), (4, 2), (4, 1), (4, 0), (4, 1), (4, 2), (4, 3), (4, 4)], total reward -60.0
Episode 2, the optimal route is [(1, 0), (1, 1), (1, 0), (0, 0), (0, 1), (1, 1), (2, 1), (3, 1), (3, 2), (3, 3), (2, 3), (3, 3), (3, 4), (4, 4)], total reward -20.0
Episode 3, the optimal route is [(0, 1), (0, 0), (1, 0), (2, 0), (2, 1), (3, 1), (2, 1), (2, 2), (2, 3), (1, 3), (2, 3), (2, 4), (1, 4), (1, 3), (2, 3), (3, 3), (3, 4), (4, 4)], total reward -10.0
Episode 7, the optimal route is [(0, 1), (0, 2), (0, 3), (0, 2), (1, 2), (0, 2), (1, 2), (0, 2), (1, 2), (1, 3), (2, 3), (3, 3), (4, 3), (3, 3), (3, 4), (3, 3), (3, 4), (3, 3), (3, 4), (4, 4)], total reward 0.0
Episode 29, the optimal route is [(0, 1), (0, 2), (1, 2), (1, 3), (1, 4), (0, 4), (1, 4), (1, 3), (2, 3), (3, 3), (3, 4), (4, 4)], total reward 10.0